¶ Подключение и настройка 3Def BoxTurle
¶ Установка необходимых модулей
¶ Установка Happy Hare
Установите Happy Hare , убедившись, что Klipper , KlipperScreen и Moonraker обновлены до последней версии.
Клонируйте репозиторий Happy Hare на ваш Raspberry Pi:
cd ~
git clone https://gitee.com/zhiyuankkeji/Happy-Hare.git
Для установки прошивки Happy Hare выполните следующие команды через SSH на Raspberry Pi:
cd ~/Happy-Hare
./install.sh -i
Это запустит интерактивный установщик. Следуйте указаниям ниже:
Let me see if I can get you started with initial configuration
You will still have some manual editing to perform but I will explain that later
(Note that all this script does is set a lot of the time consuming parameters in the config
----------------
What type of MMU are you running?
1) ERCF v1.1 (inc TripleDecky, Springy, Binky mods)
2) ERCF v2.0
3) Tradrack v1.0
4) Angry Beaver v1.0
5) Box Turtle v1.0
6) Night Owl v1.0
7) 3MS (Modular Multi Material System) v1.0
8) 3D Chameleon
9) Other / Custom (or just want starter config files)
MMU Type (1-9)? 5
----------------
How many gates (selectors) do you have?
Number of gates? 4
----------------
Select mcu board type used to control MMU
1) BTT MMB v1.0 (with CANbus)
2) BTT MMB v1.1 (with CANbus)
3) Fysetc Burrows ERB v1
4) Fysetc Burrows ERB v2
5) Standard EASY-BRD (with SAMD21)
6) EASY-BRD with RP2040
7) Mellow EASY-BRD v1.x (with CANbus)
8) Mellow EASY-BRD v2.x (with CANbus)
9) AFC Lite v1.0
10) Not in list / Unknown
MCU Type (1-10)? 2
----------------
Would you like to have neopixel LEDs setup now for your MMU?
Enable LED support? (y/n)? y
----------------
EndlessSpool? This uses filament runout detection to automate switching to new spool without interruption
Enable EndlessSpool (y/n)? y
----------------
Finally, would you like me to include all the MMU config files into your printer.cfg file
Add include? (y/n)? y
Would you like to include Mini 12864 screen menu configuration extension for MMU (only if you have one!)
Include menu (y/n)? n
Recommended: Would you like to include the default pause/resume macros supplied with Happy Hare
Include client_macros.cfg (y/n)? y
Addons: Would you like to include the EREC filament cutter macro (requires EREC servo installation)
Include mmu_erec_cutter.cfg (y/n)? n
Addons: Would you like to include the Blobifier purge system (requires Blobifier servo installation)
Include blobifier.cfg (y/n)? n
¶ Установка плагина Happy Hare для KlipperScreen
Выполните следующие команды в SSH (по одной строке):
cd ~
mv KlipperScreen KlipperScreen.orig
git clone https://gitee.com/zhiyuankkeji/KlipperScreen.git
cd ~/KlipperScreen/happy_hare
./install_ks.sh -g 4
¶ Настройка многоцветного MMU
¶ 1. Замените конфигурацию на адаптированную для 3Def BoxTurle
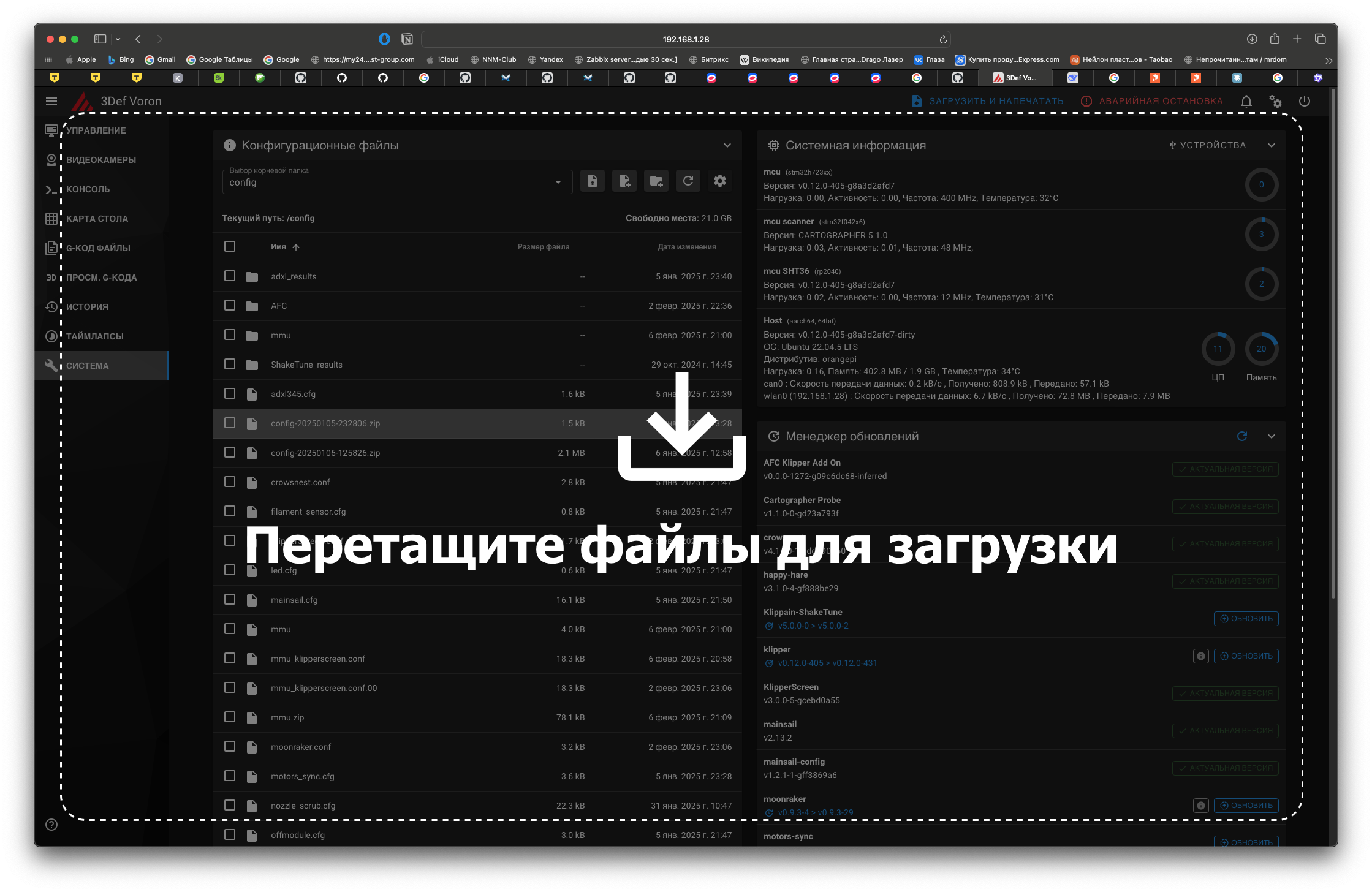
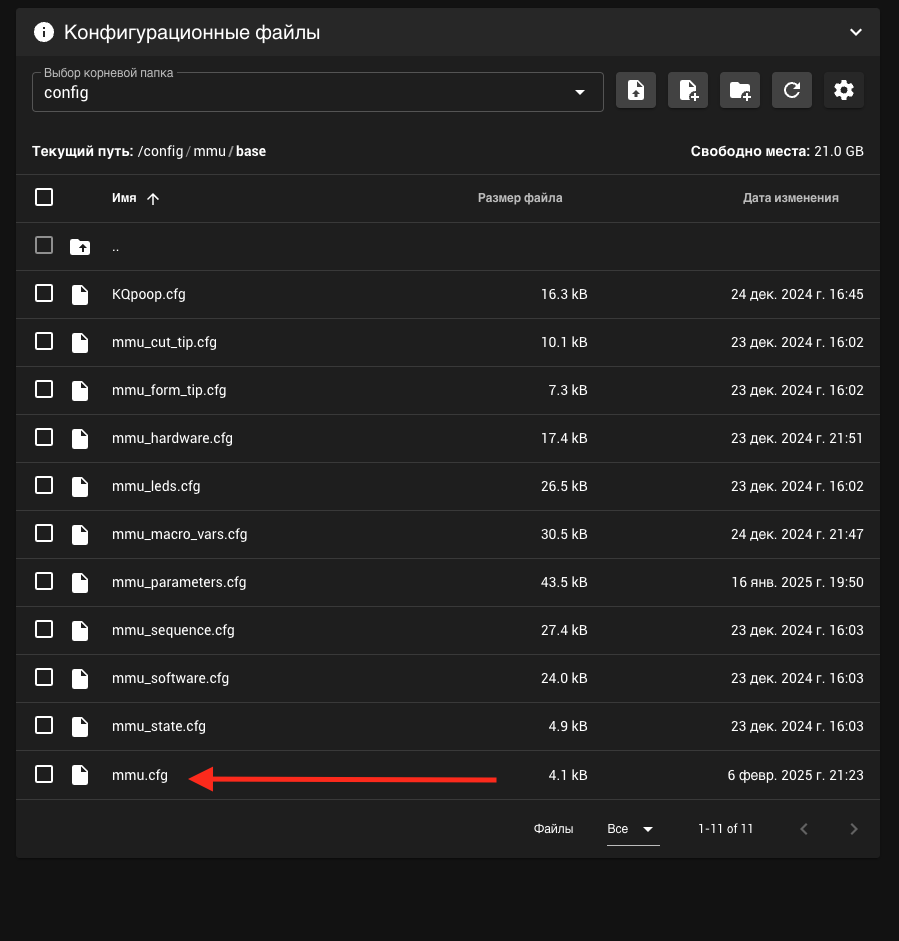
Перенесите архив с конфигурацией на принтер, для этого просто перетаскиваем в раздел с файлами конфигурации:
Подключитесь к принтеру по SSH и введите следующие команды:
cd ~/printer_data/config
unzip mmu.zip
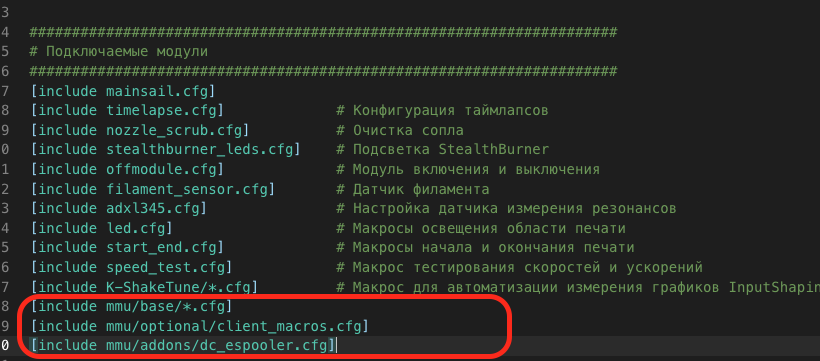
¶ 2. Добавьте следующие строки в файл printer.cfg (обычно они добавляются автоматически после установки):
[include mmu/base/*.cfg]
[include mmu/optional/client_macros.cfg]
[include mmu/addons/dc_espooler.cfg]
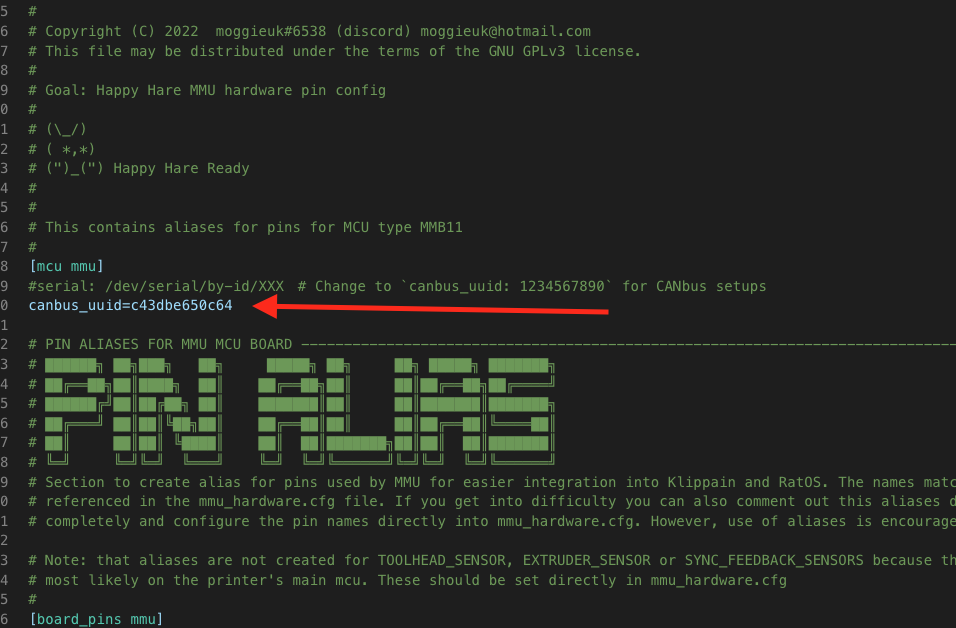
¶ 3. Определите ID платы MMU и измените его в конфигурационном файле
Подключитесь к принтеру через SSH и выполните следующие команды для определения ID платы:
Если используется CAN-соединение:
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0

Если используется USB-соединение:
ls /dev/serial/by-id/*
Затем внесите найденный ID в файл mmu.cfg.
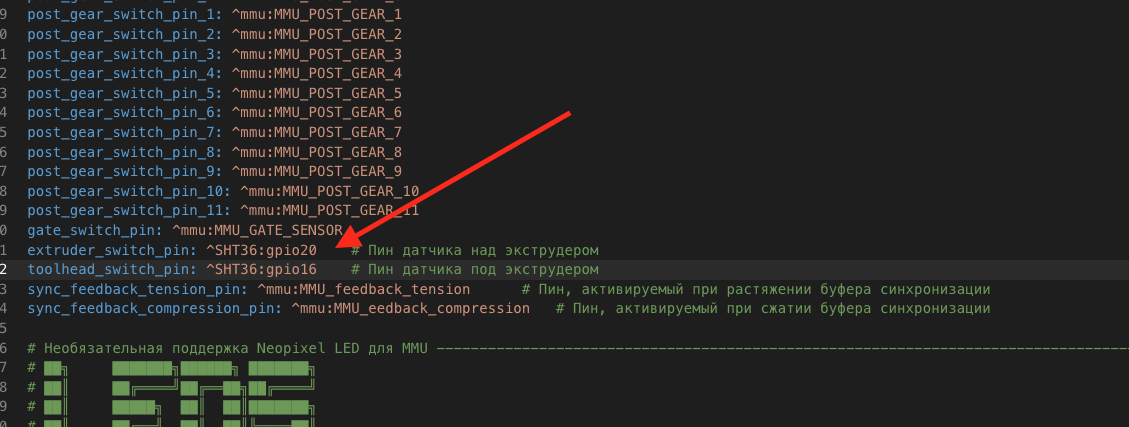
¶ 4. Измените PIN-назначения датчиков экструдера
Этот файл находится по пути /mmu/base/mmu_hardware.cfg.
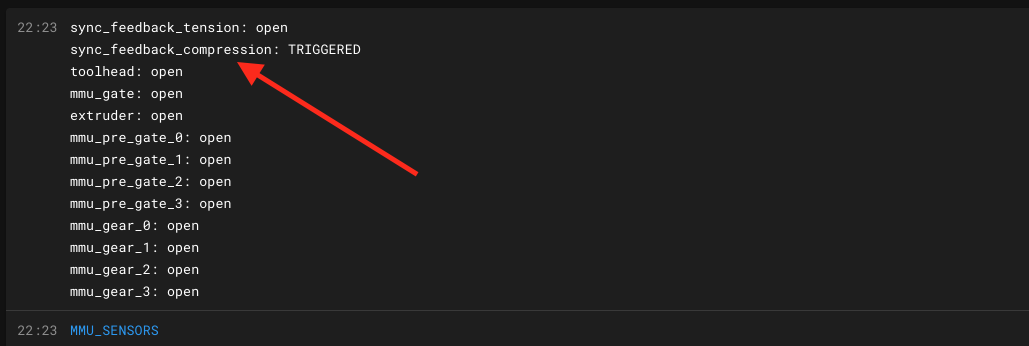
¶ 5. Проверьте состояние триггеров всех датчиков (при вставке и извлечении материала убедитесь, что они меняются)
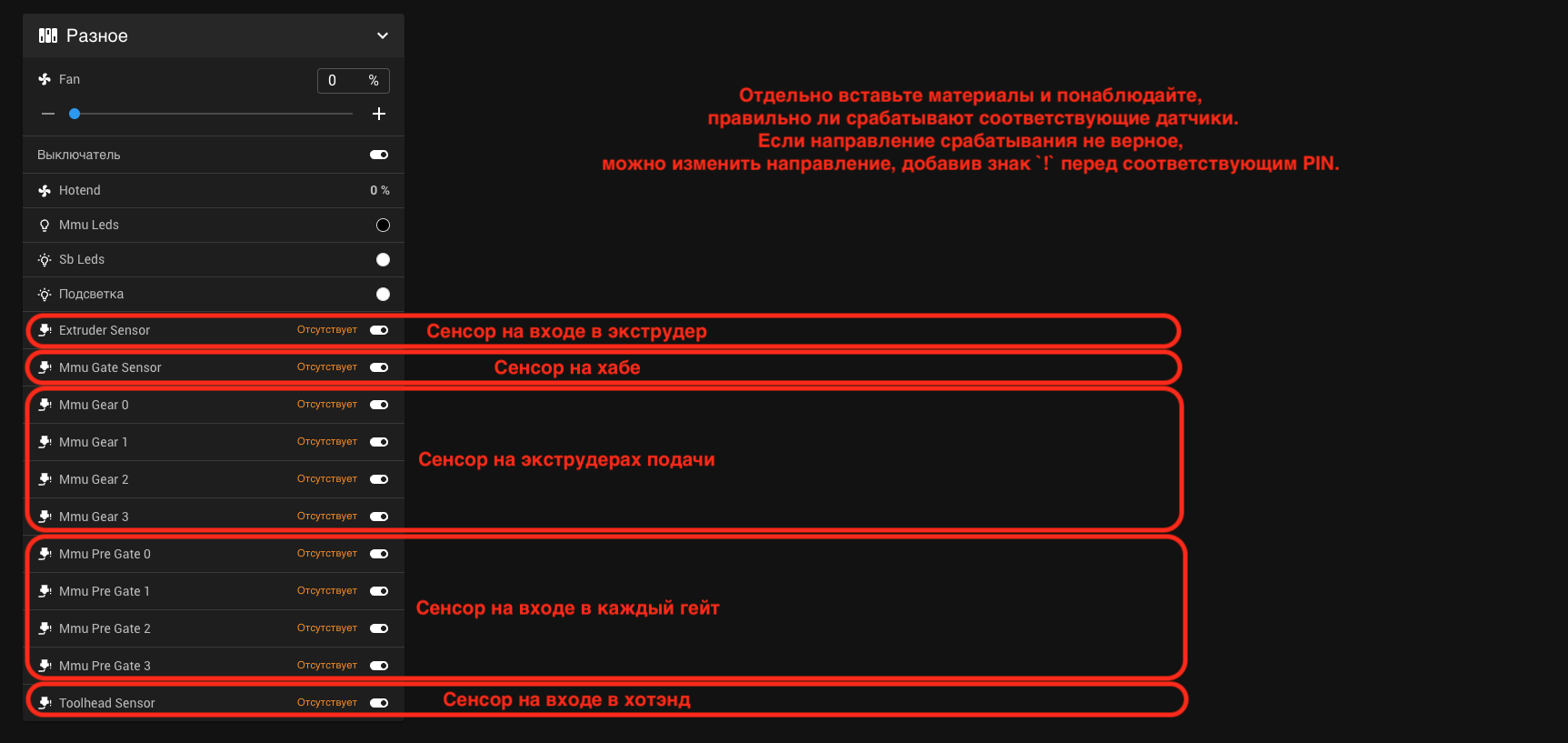
Для проверки сенсоров TurtleNeck отправьте следующую команду в консоль:
MMU_SENSORS
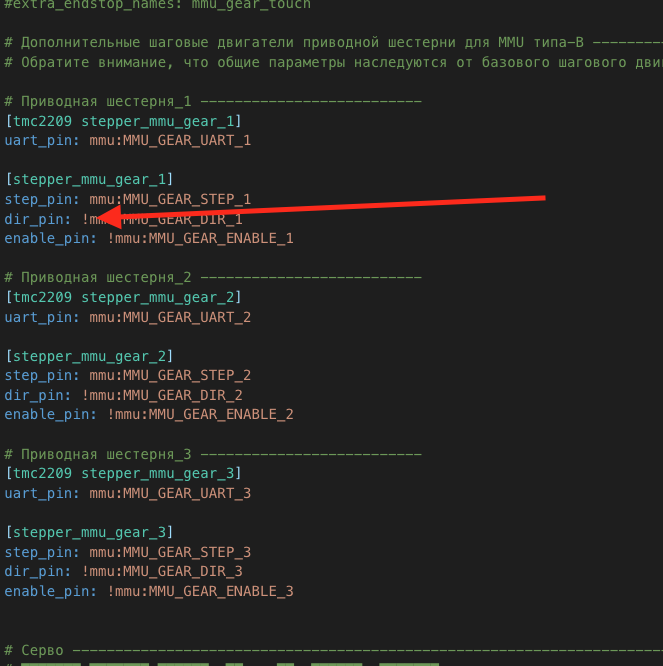
¶ 6. Калибровка шагового значения экструдера
Отправьте следующую команду в консоль для активации двигателя экструдера первого канала:
MMU__HOME TOOL=0 FORCE_UNLOAD=0
Вставьте материал в первый канал и отправьте следующую команду, чтобы захватить материал:
MMU_TEST_MOVE MOVE=10
Если направление вращения двигателя неправильное, измените DIR соответствующего шагового двигателя в файле /mmu/base/mmu_hardware.cfg, добавив перед ним знак ! для изменения направления.
Затем сделайте отметку на материале на расстоянии 120 мм и отправьте следующую команду, чтобы выдавить 100 мм материала:
MMU_TEST_MOVE MOVE=100
Измерьте оставшуюся длину материала, затем вычтите её из 120 мм. Полученное значение используйте для изменения следующей команды, после чего отправьте её в консоль, чтобы система автоматически пересчитала значение шага:
MMU_CALIBRATE_GEAR MEASURED= Введите рассчитанное значение
Пример: Если вы отметили материал на расстоянии 120 мм, отправили команду MMU_TEST_MOVE MOVE=100 и измерили оставшуюся длину 18 мм, то (120 - 18 = 102). Таким образом, отправьте команду:
MMU_CALIBRATE_GEAR MEASURED=102
Далее необходимо извлечь материал и повторно проверить корректность калибровки. Отправьте следующую команду для извлечения 200 мм материала:
MMU_TEST_MOVE MOVE=-200
После этого снова вставьте материал, отправьте команду для его захвата:
MMU_TEST_MOVE MOVE=10
Сделайте отметку на расстоянии 120 мм и отправьте следующую команду для выдавливания 100 мм материала:
MMU_TEST_MOVE MOVE=100
Измерьте оставшуюся длину. Если она находится в пределах ±0.5 мм от 20 мм, калибровка завершена. Если всё ещё есть погрешность, повторите вышеописанные шаги для более точной настройки.
¶ 7. Калибровка шагового значения второго экструдера
Отправьте следующую команду в консоль для активации двигателя экструдера второго канала (замените TOOL=1 на TOOL=2 для третьего канала и так далее):
MMU_HOME TOOL=1 FORCE_UNLOAD=0
Повторите процедуру калибровки, описанную в пункте 6, для каждого канала.
¶ 8. Калибровка длины трубки
Измерьте длину тефлоновой трубки от выхода многоцветного HUB до сопла принтера, затем добавьте 150 мм к полученному значению и измените следующую команду, указав полученную длину в миллиметрах:
MMU_CALIBRATE_BOWDEN BOWDEN_LENGTH=1440
Если калибровка не удалась и необходимо извлечь материал из канала, используйте следующую команду, заменив число на желаемую длину извлечения:
MMU_TEST_MOVE MOVE=1500
¶ 9. Настройка координат ножа
После установки ножа и его фиксатора выполните сброс XY, затем переместите нож к фиксатору так, чтобы он находился на расстоянии около 0.5 мм, при этом убедитесь, что нож центрирован относительно фиксатора по оси Y. Запишите текущие координаты XY головки.
Затем нажмите на ручку ножа до полного захода, переместите ось X так, чтобы нож находился на расстоянии около 0.5 мм от фиксатора в полностью сжатом состоянии. Запишите текущую координату X.
Измените файл /mmu/base/mmu_macro_vars.cfg:
-
Измените координаты
variable_pin_loc_xyна координаты X и Y, когда ручка ножа касается фиксатора в непressed состоянии. -
Измените координаты
variable_pin_loc_compressedна координату X, когда нож находится в полностью сжатом состоянии.
¶ 10. Настройка координат для удаления комков, очистки сопла и других операций
Отредактируйте файл /mmu/base/KQpoop.cfg.
Перемещаем голову в правый задний угол стола. Оставляем 5 мм до края стола справа и сзади. Записываем координаты и добавляем их в переменную variable_purge_loc_xy:
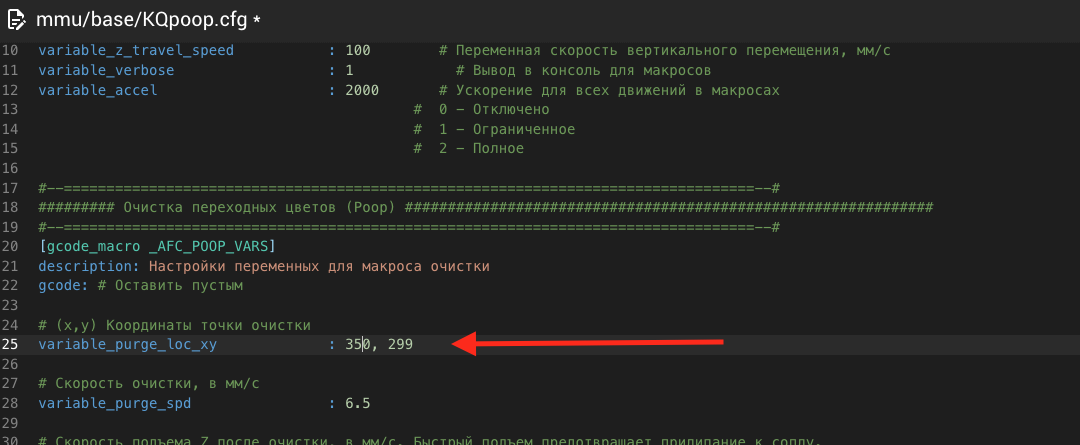
Обратите внимание, что этот угол будет всегда использоваться для смены цвета, поэтому реккомендуем в слайсере сделать этот угол запрещённым для печати.
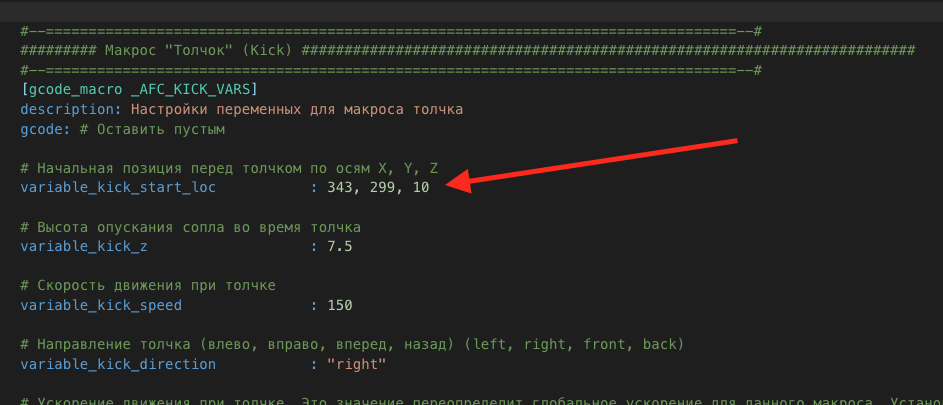
Теперь нам нужно указать координаты для макроса сброса комков. Обычно можно просто уменьшить координату X на 7 мм, оставив координату Y без изменений и укажите её в переменно variable_kick_start_loc
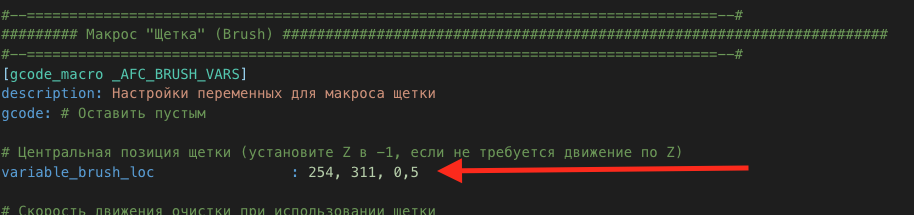
Подведите голову в центр щётки очистки. Запишите координаты и укажите их в variable_brush_loc:
¶ 11. Настройка макросов в слайсере
Добавьте следующие строки в конец начального G-CODE в слайсере:
;Сообщить принтеру информацию о материале, цвете и т.д.
MMU_START_SETUP INITIAL_TOOL={initial_tool} REFERENCED_TOOLS=!referenced_tools! TOOL_COLORS=!colors! TOOL_TEMPS=!temperatures! TOOL_MATERIALS=!materials! FILAMENT_NAMES=!filament_names! PURGE_VOLUMES=!purge_volumes!
MMU_START_CHECK
;Загрузить материал
MMU_CHANGE_TOOL TOOL={initial_extruder}
Добавьте следующую строку в G-CODE для смены материала в слайсере:
;Смена цвета
T[next_extruder]
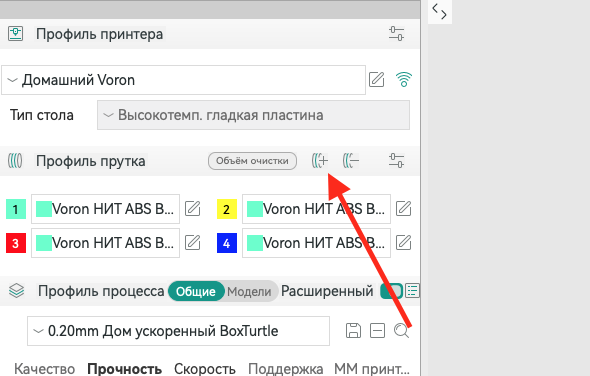
Добавьте 4 канала материала в слайсер:
Настройка завершена! Приятного использования!
Ознакомьтесь с документацией на сайте Happy Hare:
moggieuk/Happy-Hare: Драйвер программного обеспечения MMU для Klipper (ERCF, Tradrack, Box Turtle, Night Owl, Angry Beaver, 3MS, ...)